live
adv-camera
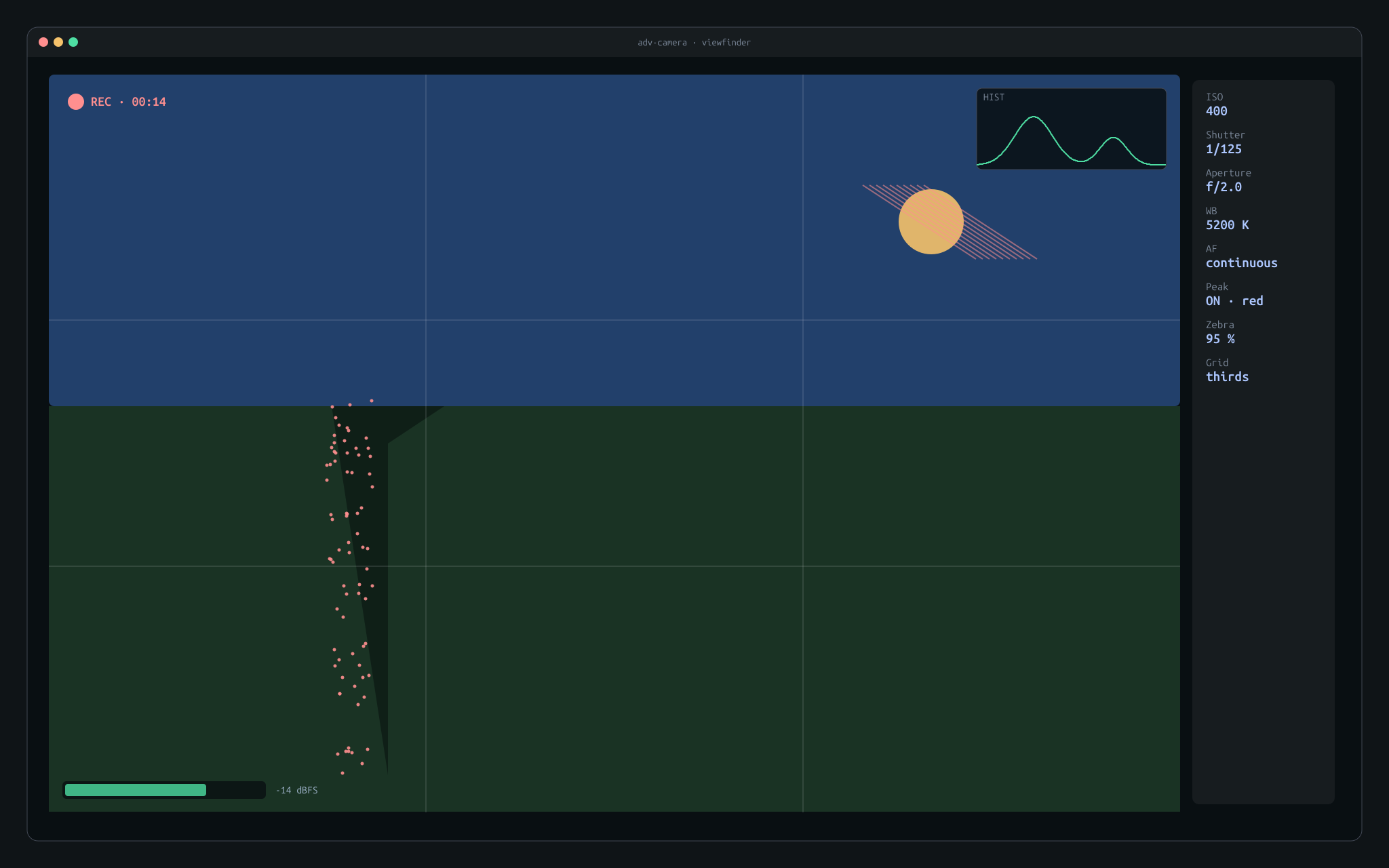
A native Linux camera app for the Surface Pro 9. GTK4 + libadwaita +
GStreamer on libcamera. Manual focus, manual exposure/ISO,
focus peaking, zebra stripes, live histogram, composition grids, digital
zoom + pan, video and audio recording, and a tuning panel that reaches
all the way down into the libcamera SoftISP YAML and the raw I²C
registers on the focus motor.