Projects I use.
 magicnote · the notebook that listens
magicnote · the notebook that listens
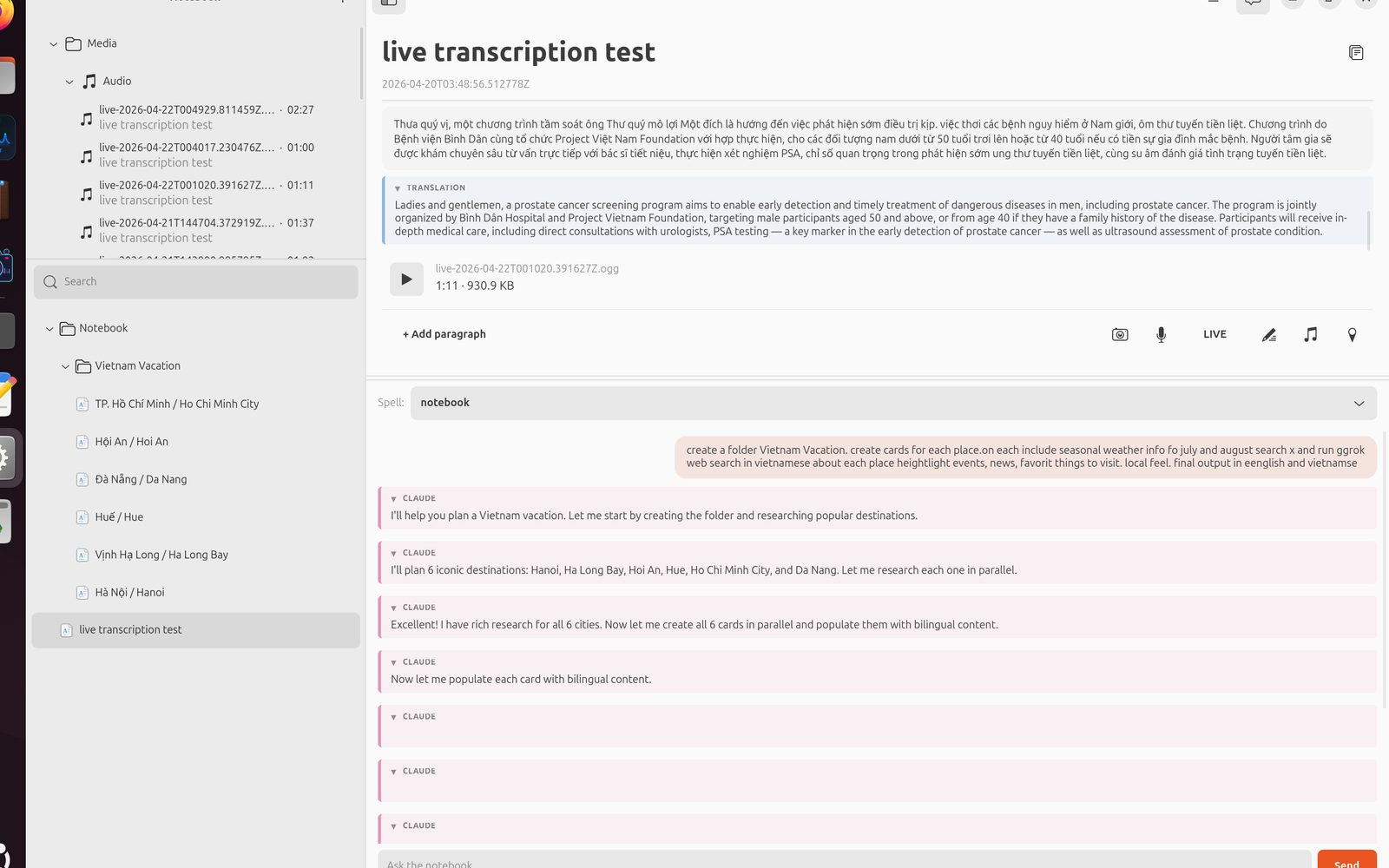
Magicnote
Magicnote is a notebook that listens, watches, and helps you think. You write in it the way you'd write in any notebook — pages inside folders — but it can also record audio, take photos, accept drawings, and talk to an assistant that reads and edits alongside you.
 mcp trio · location · weather · search
mcp trio · location · weather · search
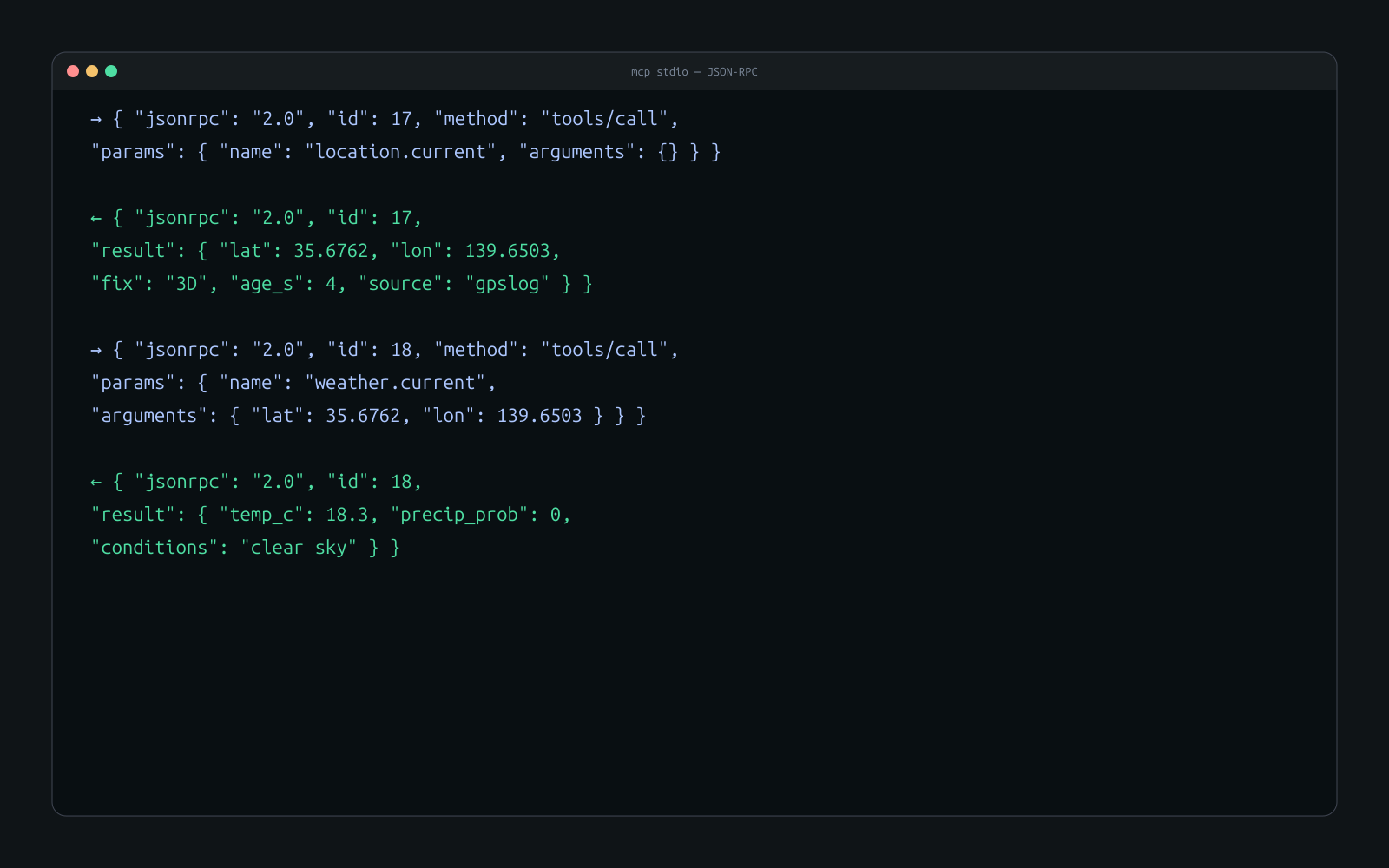
MCP Trio for MagicNote
Three small MCP servers that give MagicNote's agent real situational awareness. Where I am, what the sky is doing, what's happening on X right now. Weather runs in a container on dockerllm; gpslog is stdio-native.
 hackrf · SIGINT workstation
hackrf · SIGINT workstation
HackRF SIGINT Dashboard
Browser-first spectrum + waterfall, 30+ US band allocations, remote PortaPack control. Hardware interrogated command-by-command over the ChibiOS shell — every button traces back to something verified on the device.
 adv-camera · libcamera + GTK4
adv-camera · libcamera + GTK4
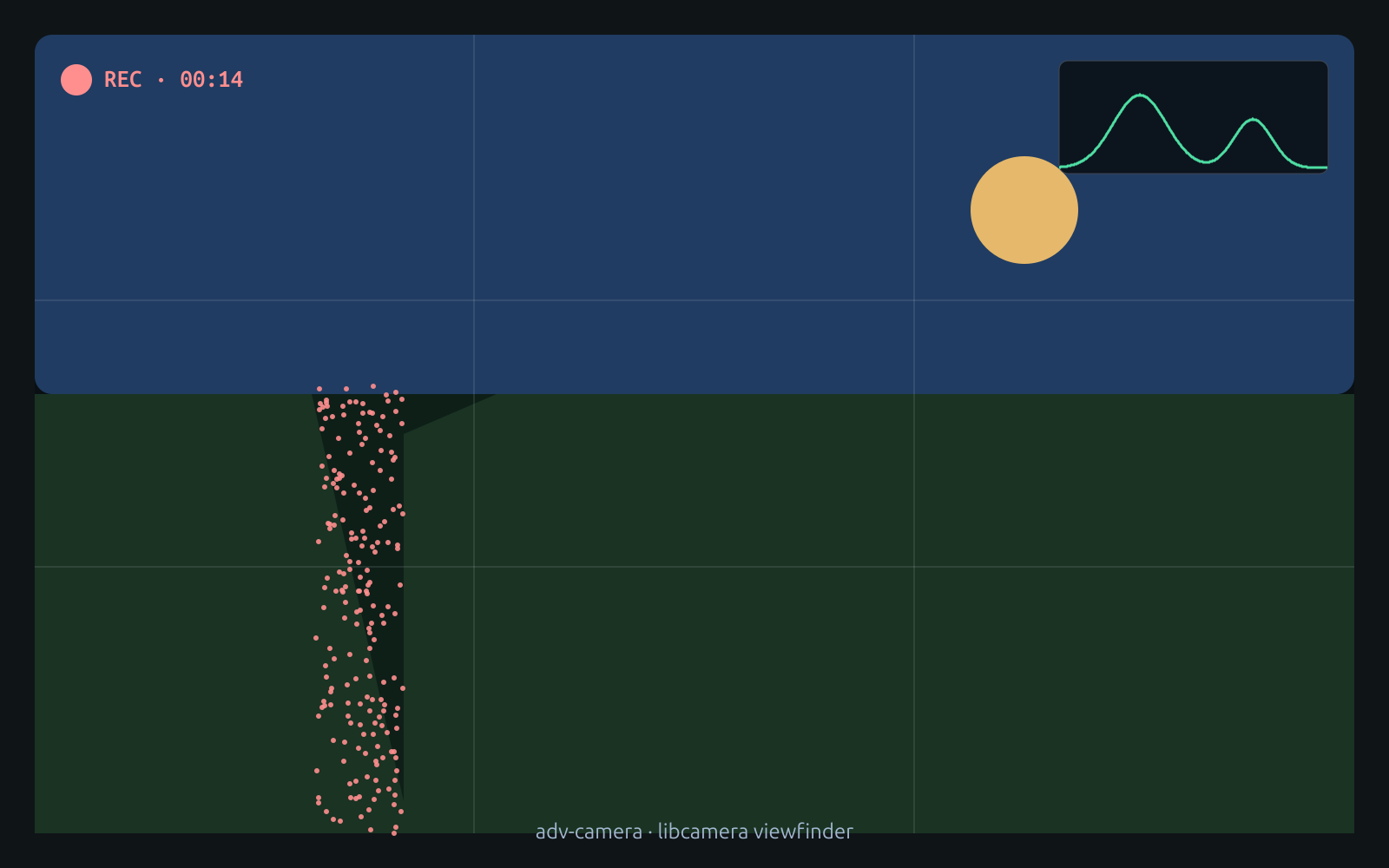
adv-camera
Python + GTK4 + GStreamer on libcamera. Autofocus, histogram,
audio levels, recording. The rear 13 MP Surface sensor streams at 30 fps —
something that took a custom libcamera build and an IPA tuning file to achieve.
 surface_osk · OSK manager daemon
surface_osk · OSK manager daemon
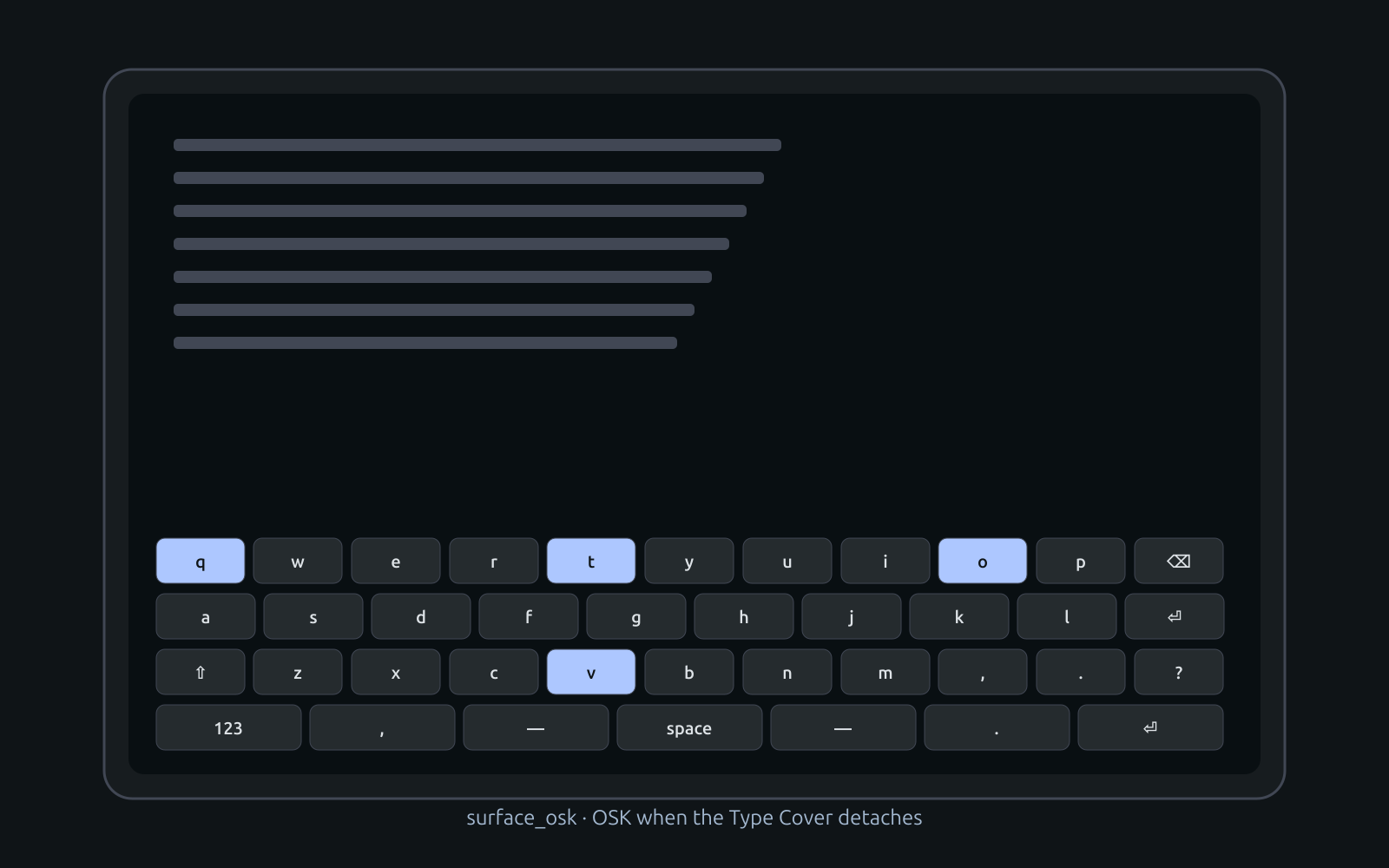
surface_osk
A tiny Python daemon that toggles GNOME's on-screen keyboard based on whether you have a real keyboard attached. pyudev, evdev capability checks, 1.5 s debounce, and a sleep/resume listener. No polling.
 gsm + gps · surface radio probes
gsm + gps · surface radio probes
GSM + GPS Probes
Command-line probes for the Surface's cellular modem and GPS hardware.
A dashboard for event diagnostics feeds into gpslog, which
the MCP server reads.